Trace d'exécution du planification au Scavender Hunt (post-challenge)
- Début de l'expérience: 2005-07-12 20h06 EST
- Nom du log: loglastrun
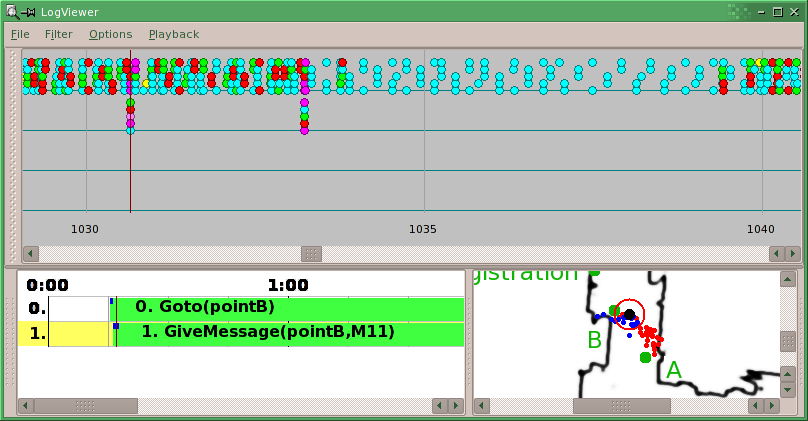
Logviewer annimé pour partie planification
Légende
- Événements planification : 2e bande de points
- violet : événement général (nouvelle tâche, nouvelle état, msg debut, ...)
- bleu pâle: progression dans le plan (passer et activer l'action suivante)
- rouge : début de génération de plan
- vert : fin de génération de plan (succède toujours un point rouge!)
- Visionneuse de plan
- bande verte : intervale de temps où l'action est placé pour exécution
- petite bande bleue : intervale de temps estimée pour le meilleure cas (le plus tôt possible)
- petite bande rouge : intervale de temps estimée pour le pire cas (le plus en retard possible)
- surlignement rouge pâle : action présentement exécuté
- surlignement jaune pâle : action en attente pour être exécuté
- Carte
- point noir / rouge encerclé : position du robot estimé par Carmen
- points rouges : positions du robot dans le passé
- points bleus: positions du robot dans le futur
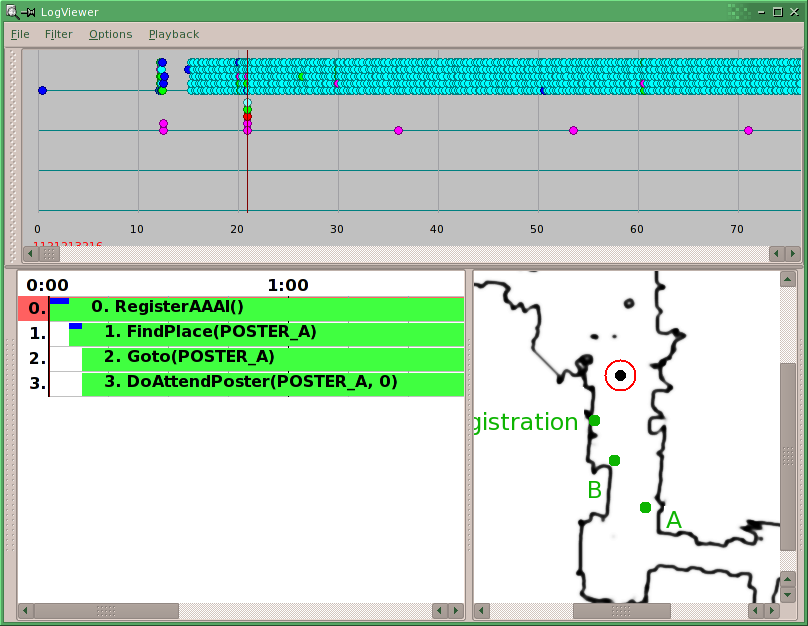
Événements
t=20; nouvelle tâche : AttendPoster(place=A, durée=0)
- La place A n'est pas connue, il faut donc la trouver
- Le robot n'est pas enregistrer, l'action RegisterAAAI est donc générée en début de plan
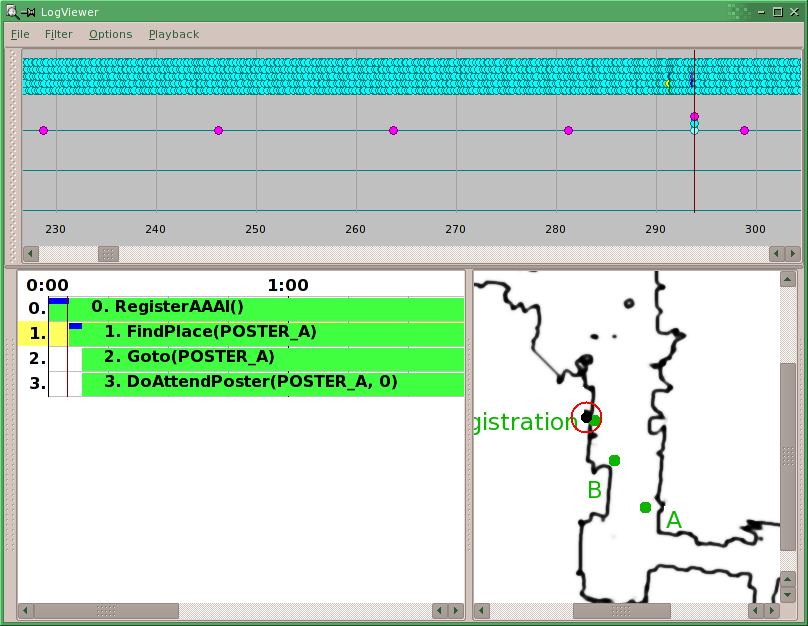
t=294; Enregistrement complété
- On essait de trouver la place A
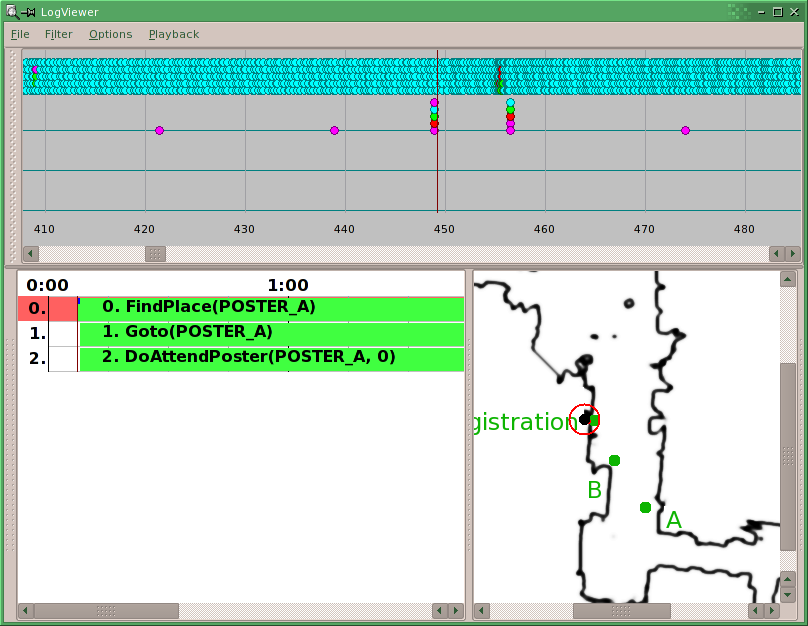
t=449; La place B est trouvé
- Ne change rien au plan restant
- L'action 0 (RegisterAAAI) n'est plus
généré car elle a été
complétée avec succès
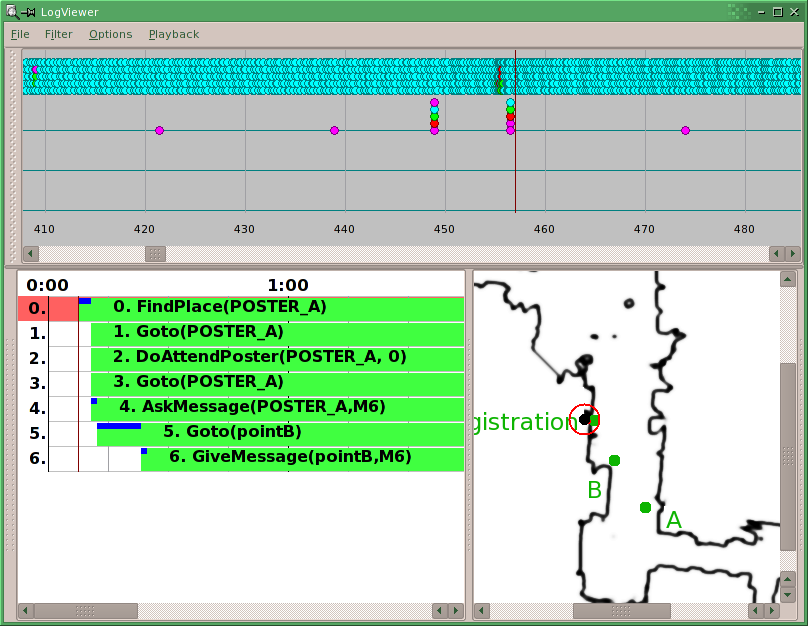
t=456; nouvelle tâche : Livrer message de A à B
- La place A n'est toujours pas connue, il faut donc la trouver
- On estime qu'il est tjrs possible de faire le AttendPoster, mais pas avant la réception du message
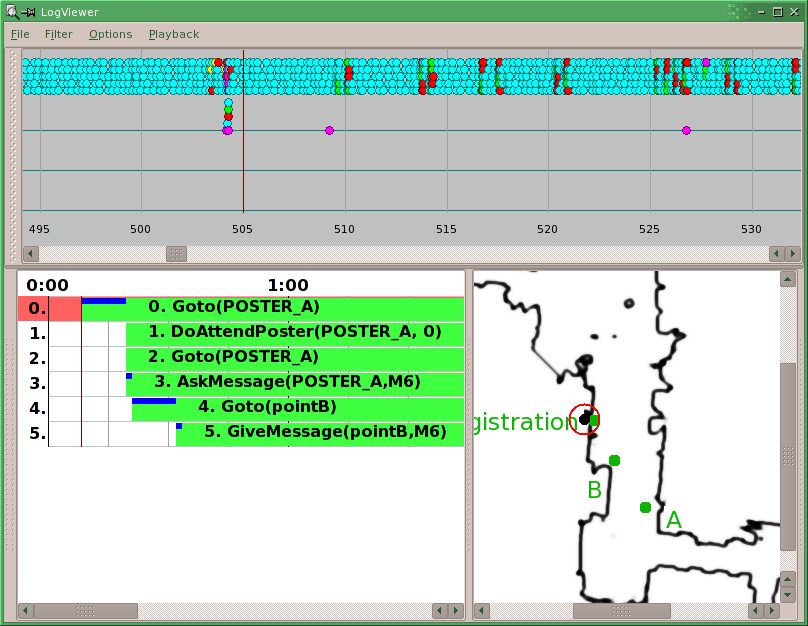
t=505; La place B est trouvée
- Un nouveau plan est regénéré même si le plan courrant est valide
t=900; AttendPoster est instantanné (durée=0)
- On passe à l'action suivante
- Puisque le robot est arrivé à A plus tôt
que prévu (voir barre bleu du Goto(A)) , il y a peut-être
un possibilité de trouver une oportunité
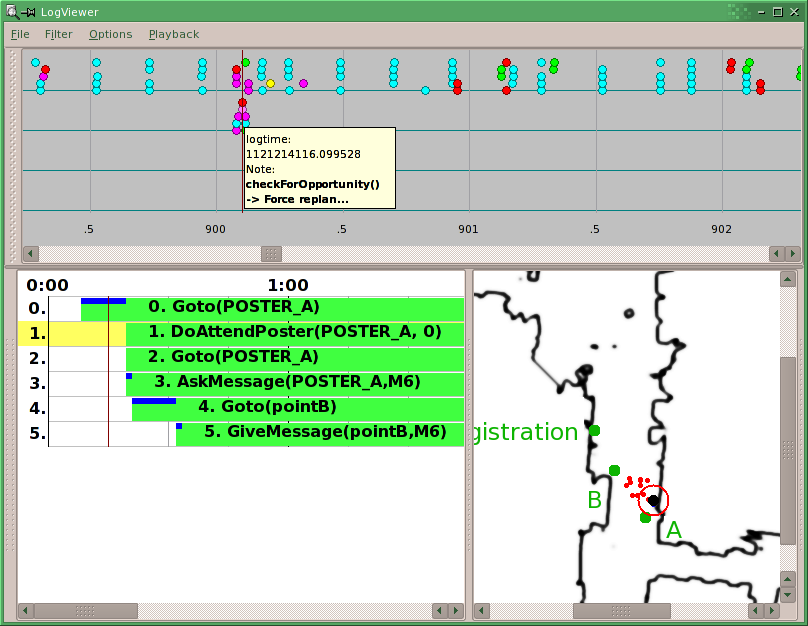
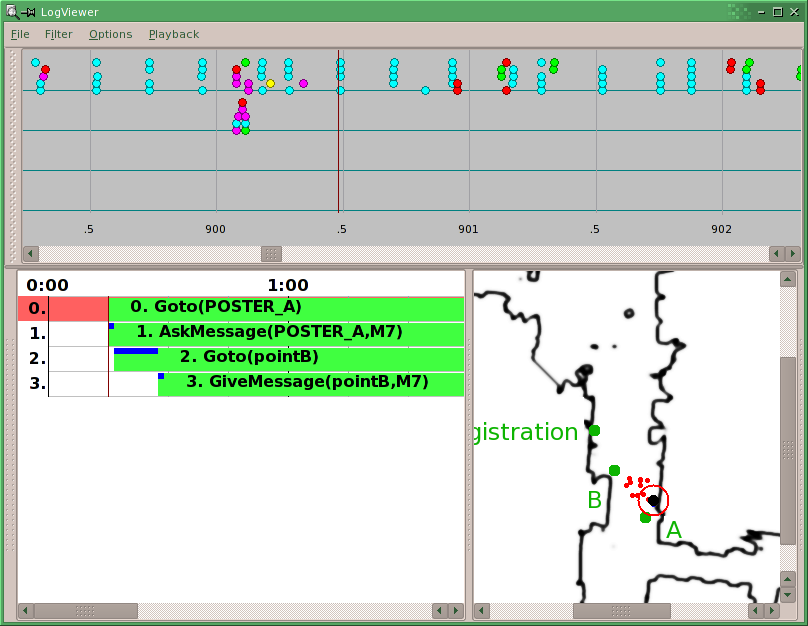
t=900.2; nouveau plan
- Aucun gain (mission trop simplice)
t=930; message reçu au point A
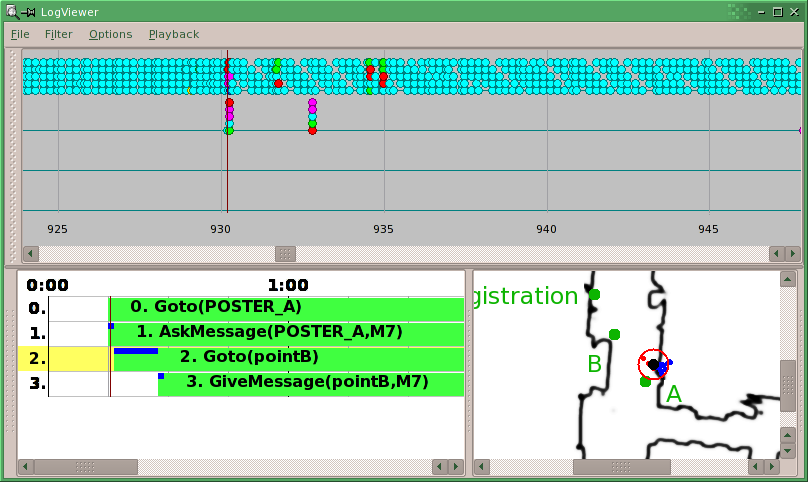
t=1030; Message prêt à être donné à B
- Le goto est complété, le GiveMessage est en exécution
Suite...
- Le message n'est jamais donnée... causes :
- le destinataire ne doit jamais recevoir le message comme il le faut...
- le givemessage est mappé à qqch d'autre ?