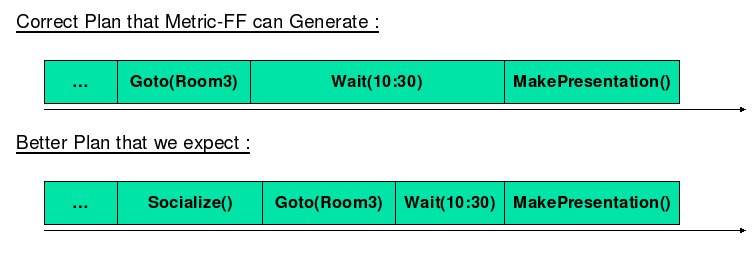
The first plan is the optimal plan where the number of step are the optimality critaria. But, for the AAAI Challange, we hope that the planner will consider Socialize action. In this case, an optimal plan is a plan where waiting time is minimize and where Socialize action are insered as time consuming actions.
4. The first approach
With PDDL 2.1 level 2, it is possible to maximize a value. So, our first idea was to add a score variable in the state representation.ScientificConf_exA.pddl
| (define (domain ScientificConference) (:requirements :typing :fluents) [...] (:functions [...] (score) ) ; end functions section [...] (:action SOCIALIZE15 :parameters(?loc - location) :precondition(and (robot-at ?loc) (socializing-place ?loc) (registered) (>= (battery-level) (* 900 (energyconsumed-per-second))) (<= (currenttime) 56700) ; avant 15:45.... conference ending at 16:00! ) :effect(and (increase (score) 10) (decrease (battery-level) (* 900 (energyconsumed-per-second))) (increase (currenttime) 900) ) ) [...] |
Test File : test_socializeA.fct (contain a line with " (:metric maximize (score)) " )
# the argment -O is important to enable the optimizer
[$METRIC-FF_PATH]/ff -o ScientificConf_exA.pddl -f test_socializeA.fct -O
Planner output :
warning: change on metric in wrong direction. metric replaced with plan length.
# the argment -O is important to enable the optimizer
[$METRIC-FF_PATH]/ff -o ScientificConf_exA.pddl -f test_socializeA.fct -O
Planner output :
warning: change on metric in wrong direction. metric replaced with plan length.
5. The second approach
Since we cannot maximize a decreasing value, we tried to minimize total-waited-time. In this case, we add a new variable total-waited-time in the state representation and we increase this value each time we wait.ScientificConf_exB.pddl
| (define (domain ScientificConference) (:requirements :typing :fluents) [...] (:functions [...] (total-waited-time) ) ; end functions section [...] (:action WAIT-PRES-SESSION :parameters(?ses - pres-session) :precondition(and (< (currenttime) (time-pres-begin ?ses)) ;(>= (currenttime) (- (time-pres-begin ?ses) 300)) (>= (battery-level) (* (- (time-pres-begin ?ses) (currenttime)) (energyconsumed-per-second))) ) :effect(and (increase (currenttime) (- (time-pres-begin ?ses) (currenttime))) (increase (total-waited-time) (- (time-pres-begin ?ses) (currenttime))) (decrease (battery-level) (* (- (time-pres-begin ?ses) (currenttime)) (energyconsumed-per-second))) ) ) [...] |
This second approach was not possible due to a second limitation of Metric-FF. It is not possible to optimize a value that are increased with non-constant expression.
Test file : test_socializeB.fct (contain a line with " (:metric minimize (total-waited-time)) " )
../Metric-FF/ff -o ScientificConf_exB.pddl -f test_socializeB.fct -O
warning: non-constant effect on metric. metric replaced with plan length.
../Metric-FF/ff -o ScientificConf_exB.pddl -f test_socializeB.fct -O
warning: non-constant effect on metric. metric replaced with plan length.
6. The third approach
We think about a other approach. The real problem is that WAIT actions takes too much time. Another idea is to fix an upper bound on the WAIT duration (fixed to 5 minutes). So, planner will need to introduce others actions to consume time. Also, we created an action SOCIALIZEUNTIL that do socialize until the time of a presentation minus 5 minutes.ScientificConf_exC.pddl
| (define (domain ScientificConference) (:requirements :typing :fluents) [...] (:functions [...] ) ; end functions section [...] (:action WAIT-PRES-SESSION :parameters(?ses - pres-session) :precondition(and (< (currenttime) (time-pres-begin ?ses)) (>= (currenttime) (- (time-pres-begin ?ses) 300)) (>= (battery-level) (* (- (time-pres-begin ?ses) (currenttime)) (energyconsumed-per-second))) ) :effect(and (increase (currenttime) (- (time-pres-begin ?ses) (currenttime))) (decrease (battery-level) (* (- (time-pres-begin ?ses) (currenttime)) (energyconsumed-per-second))) ) ) (:action SOCIALIZEUNTIL :parameters(?loc - location ?ses - pres-session) :precondition(and (robot-at ?loc) (socializing-place ?loc) (registered) (< (currenttime) (- (time-pres-begin ?ses) 300)) (>= (battery-level) (* 900 (energyconsumed-per-second))) ) :effect(and (decrease (battery-level) (* 900 (energyconsumed-per-second))) (assign (currenttime) (- (time-pres-begin ?ses) 300)) ) ) [...] |
Tests :
We test this approach with test1_nav.fct, an easy problem.
In our tests with normal domain, test1_nav.fct was resolved in 5 seconds. With our last modification, the performance of the planner is not satisfated. So, we have to reject this approach even it's working.
We test this approach with test1_nav.fct, an easy problem.
| # With Enforced Hill-Climbing ../Metric-FF/ff -o ScientificConf_exC.pddl -f test1_nav.f
Plan : Planner takes > 500MB of memory... no plan...
# Without Enforced Hill-Climbing ../Metric-FF/ff -o ScientificConf_exC.pddl -f test1_nav.f -E -h 1
Plan : 0: GOTO STARTPLACE P15
1: GOTO P15 STARTPLACE 2: GOTO STARTPLACE P15 3: GOTO P15 STARTPLACE 4: GOTO STARTPLACE WP_6 5: GOTO WP_6 STARTPLACE 6: GOTO STARTPLACE P29 7: GOTO P29 REGISTRATION 8: REGISTER REGISTRATION 9: GOTO REGISTRATION WP_1 10: SOCIALIZEUNTIL WP_1 PRESSESSION1 11: GOTO WP_1 STANDROOM_2 12: WAIT-PRES-SESSION PRESSESSION1 13: MAKE-PRESENTATION STANDROOM_2 PRESSESSION1 Time : 47sec |
In our tests with normal domain, test1_nav.fct was resolved in 5 seconds. With our last modification, the performance of the planner is not satisfated. So, we have to reject this approach even it's working.