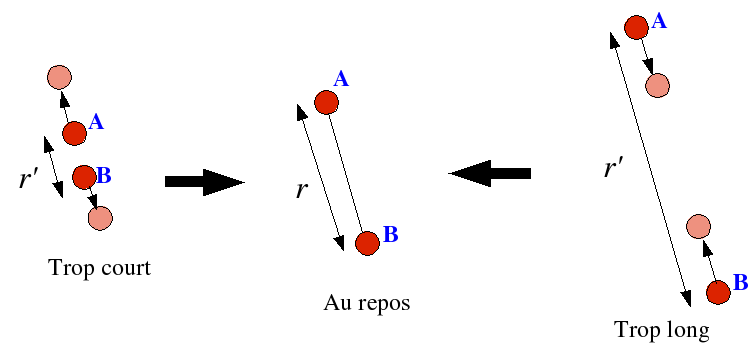
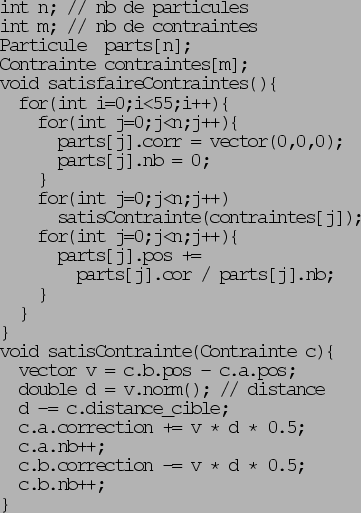
Dans un cas réel ayant plusieurs contraintes de distance, il faut porter une attention particulière à la façon d'effectuer les calculs afin d'éviter que l'ordre du parcours des contraintes ait un impact sur le résultat de la simulation. Pour ce faire, à chaque contrainte, on calcule des corrections qui doivent être appliquées aux positions des particules. Après avoir passé à travers toutes les contraintes, pour chacune des particules, on applique la moyenne de toutes les corrections. Enfin, pour donner de bons résultats, il faut appliquer cette procédure plusieurs fois. En pratique, 40 à 55 itérations de satisfaction de contrainte par itération de simulation donnent de bons résultats. Le code associé à cette partie est à la figure 8.
L'avantage de cette méthode est qu'elle est très simple et très rapide. Contraintement aux réseaux de masse-ressorts, la satisfaction de contrainte de distance ne requiert pas d'ajustement de paramètres comme des coefficients de tension et des facteurs d'amortissement qui ne sont pas toujours facile à paramétrer correctement. Ici, pour modifier la rigidité, on n'a qu'à jouer avec le nombre d'itérations. Plus il est grand, plus les tiges seront rigides. Par contre, plus on désire de la rigidité, plus le temps de calcul requis pour la simulation sera important. Il est à noter que la technique discutée ici ainsi que le code à la figure 8 ne sont pas optimisés. Certaines optimisations possibles sont présentées dans [Jak01].