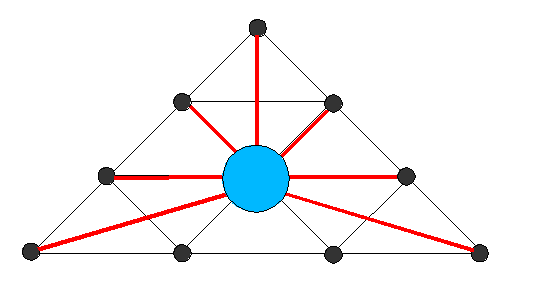
Pour notre simulateur, nous avons représenté un pilote virtuel qui peut contrôler le deltaplane de la même façon qu'un deltaplane réel, soit en déplacant sa masse. Pour y arriver, nous avons introduit une particule, juste au-dessous du deltaplane, ayant une masse très importante, soit d'environ celle d'une personne normale (55 à 70 Kg). Ce pilote virtuel est relié aux côtés à l'aide de tiges (contraintes de distance). La figure 14 illustre un exemple sur un deltaplane simplifié, où au centre, le grand cercle représente le pilote virtuel et les tiges de contrôles sont en gros trais.
Contrairement aux tiges de la structure du deltaplane, les
distances cibles (au repos) des tiges de contrôle peuvent être modifiées après leur création. Initialement,
les tiges tendent à maintenir le pilote au centre du deltaplane. Quand l'usager pilote
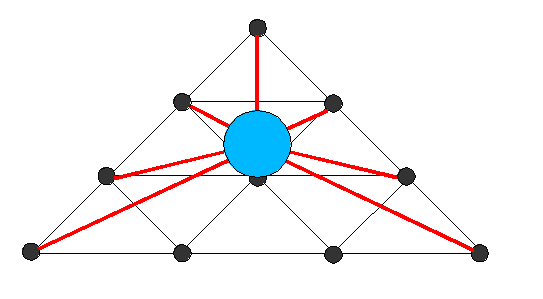
le deltaplane, on modifie les longueurs au repos de ces tiges de façon à excercer une tension
qui déplacera la position relative du pilote sous le deltaplane. Ainsi, pour amorcer une descente rapide,
l'usager peut appuyer sur la flèche vers le haut ( ![]() ), ce qui aura pour effet de modifier de
réduire la longeur des trois contraintes au haut et d'allonger les quatres contraintes d'en bas. Au cours
des prochaines itérations d'intégration, le pilote sera progressivement déplacé à l'avant du deltaplane,
comme montré à la figure 15. De plus, puisque la masse du pilote est largement
supérieure à celle du deltaplane, le déplacement final sera plus important sur la structure du deltaplane
que sur le pilote lui-même. De cette façon, on reproduit avec réalisme la possibilité de modifier facilement
l'angle de piqué du deltaplane.
), ce qui aura pour effet de modifier de
réduire la longeur des trois contraintes au haut et d'allonger les quatres contraintes d'en bas. Au cours
des prochaines itérations d'intégration, le pilote sera progressivement déplacé à l'avant du deltaplane,
comme montré à la figure 15. De plus, puisque la masse du pilote est largement
supérieure à celle du deltaplane, le déplacement final sera plus important sur la structure du deltaplane
que sur le pilote lui-même. De cette façon, on reproduit avec réalisme la possibilité de modifier facilement
l'angle de piqué du deltaplane.