suivant: Conception d'un cerf-volant
monter: Conception d'un deltaplane
précédent: Contrôle
Afin de tester notre conception, nous avons implémenté un noyau physique supportant des contraintes
de distance comme proposé par [Jak01]. L'implémentation a été faite en C++ et les
rendus de simulation sont réalisés à l'aide d'OpenGL. Afin de modéliser le sol, nous avons utilisé
un terrain de hauteur (heightfield en anglais)
d'une résolution de 256 par 256. Une simple gestion de collision a été utilisée
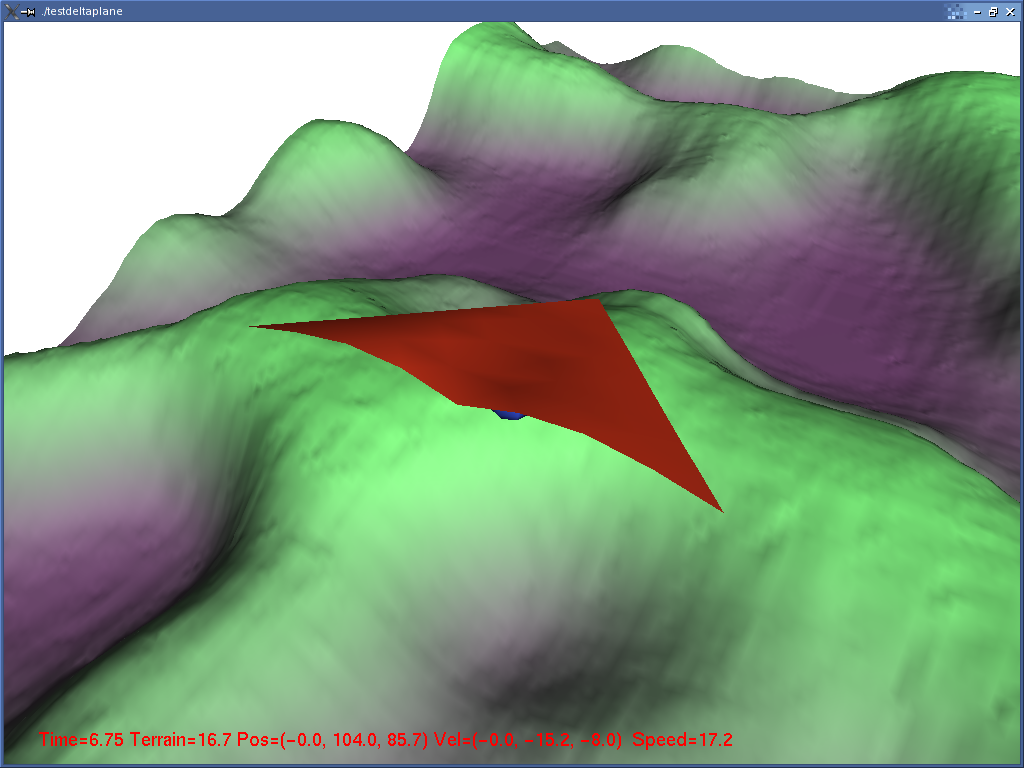
afin de maintenir l'altitude des particules supérieur ou égale à celle du terrain. Une capture de
la simulation d'un deltaplane est illustrée à la figure 16. Ce dernier a une
résolution de huit (8) particules par côté. Au total, ce deltaplane est construit à l'aide de
49 particules, 198 contraintes de distances et 64 surfaces triangulaires. Tous ces éléments
peuvent être simulé à 100 itérations par seconde sur notre machine de test. Cette dernière était
un PC équipé d'un processeur Pentium 4 condensé à 2GHz.
Figure 16:
Deltaplane simulé
|
|
Eric Beaudry
2005-01-31