


suivant: Intégration Euler
monter: Simulation de deltaplanes et
précédent: Objets mixtes
Au début de la section précédente, nous avons présenté une équation permettant de calculer
la trajectoire d'un projectile. Cette équation est obtenue par la résolution d'une
intégrale. Or, en pratique, il est très rare que l'utilisation d'une intégration symbolique
soit possible en raison de l'aspet dynamique de l'environnement simulé. Par exemple, il faut tenir compte
des collisions, des changement d'accélération, des commandes de l'usager, etc. Pour ces raisons,
nous avons recours à l'intégration numérique, ce qui consiste à calculer itérativement des
équations plusieurs fois par seconde.
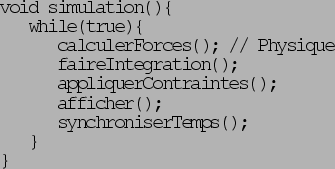
Ordinairement, la méthode d'intégration est appelée dans une boucle de simulation telle que montrée
à la figure 3. En premier lieu, on calcule les forces appliquées sur les objets,
comme la gravité, la friction avec l'air (vent), les tensions exercées par les ressorts, etc.
Ensuite, à l'aide des forces calculées, on fait une intégration. Après, si nécessaire, on peut
appliquer des contraintes, comme la détection de collision. En dernier lieu, on peut procéder à
l'affichage et synchroniser le temps de simulation avec le temps réel.
Figure 3:
Précédure générale de simulation
 |
Sous-sections
suivant: Intégration Euler
monter: Simulation de deltaplanes et
précédent: Objets mixtes
Eric Beaudry
2005-01-31